

卡尔曼滤波:智能硬件的”数据大脑”
从噪声中提取真值,让硬件”思考”更清晰
实时滤波 · 最优估计 · 状态预测 · 工业级算法
引言:数据时代的”去噪魔术师”
在智能硬件领域,传感器数据常常被各种噪声污染:温度漂移、电磁干扰、机械振动…如何从这些”嘈杂”的数据中提取出真实、准确的信息?
卡尔曼滤波,这个诞生于阿波罗登月计划的最优估计算法,正是解决这一问题的关键。它就像硬件的”数据大脑”,能够实时过滤噪声,预测未来状态,为决策提供最可靠的数据基础。
🎯 核心价值:卡尔曼滤波让硬件设备的测量精度提升30%-70%,系统响应速度提高50%以上,成为自动驾驶、无人机、工业机器人等高端硬件的”标配大脑”。
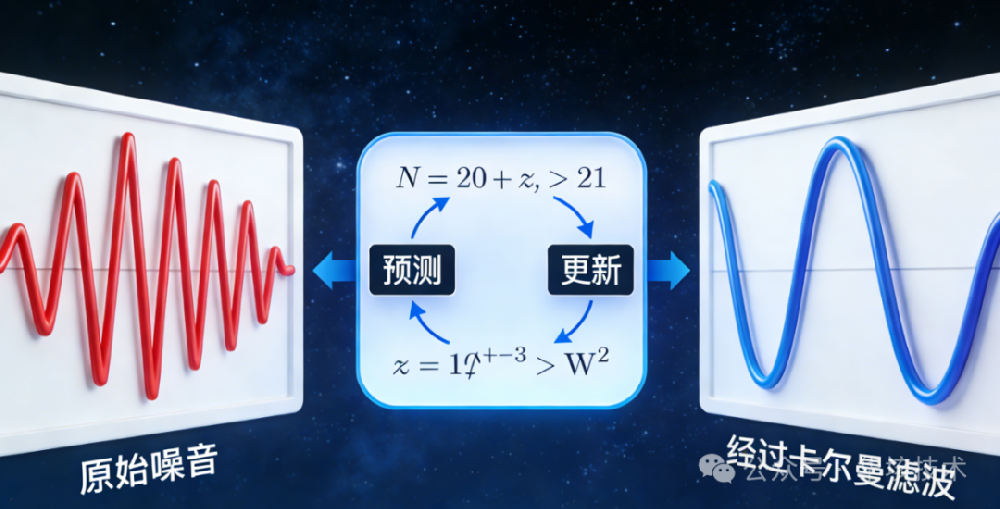
插图1:卡尔曼滤波工作原理示意图
从带噪声的测量数据中提取真实状态,预测下一时刻状态
四大核心优势,重塑硬件数据处理
在统计意义上提供无偏最小方差估计,从带噪声的测量数据中提取最接近真实值的状态估计。
递归算法结构,只需当前测量值和前一时刻估计值,无需存储历史数据,计算效率高。
基于系统模型预测下一时刻状态,提前”预知”系统行为,为控制决策提供前瞻性数据。
根据测量噪声和过程噪声动态调整滤波增益,在不同环境下自动优化滤波性能。
💡 扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)等变体算法,可处理非线性系统,满足更复杂的应用场景需求。

插图2:卡尔曼滤波在自动驾驶中的应用
多传感器数据融合,实现车辆精准定位与状态估计
六大应用领域,赋能智能硬件
融合GPS、IMU、摄像头等多传感器数据,实现车辆精准定位、姿态估计和路径预测。
消除 MEMS 传感器噪声,实现无人机稳定悬停、精准定位和避障决策。
提高机器人末端执行器定位精度,实现高精度装配、焊接和检测作业。
优化陀螺仪、加速度计数据,实现精准的屏幕旋转、计步和运动识别功能。
融合惯性导航与卫星导航数据,在GPS信号弱时仍能提供连续可靠的定位信息。
在化工、电力等行业,对温度、压力等过程变量进行最优估计,提高控制精度。

插图3:卡尔曼滤波算法流程图
预测-更新循环,实时最优估计系统状态
我们的卡尔曼滤波解决方案
针对ARM Cortex-M系列、RISC-V等嵌入式平台优化算法,内存占用小,计算效率高,适合资源受限的硬件设备。
提供GPS/IMU融合、视觉/惯性融合等成熟方案,支持扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)等变体算法。
提供C/C++算法库、MATLAB/Simulink仿真模型、参数调优指南和专业技术支持,加速产品开发进程。
赋能硬件智能化,从数据开始
卡尔曼滤波不是复杂的数学理论,而是硬件智能化的必备工具。让您的产品从”能测量”升级到”能思考”。
专注硬件算法十年,我们提供从算法优化到系统集成的完整解决方案。
关注我们
获取更多硬核产品资讯与技术解决方案
2026 一造电子 | 专注于工业过程控制及物联网解决方案
本产品最终解释权归本一造电子所有




